铸造系统中的制动电阻与制动单元应用(上) 摘 要:本文介绍了罗克韦尔自动化PowerFlex700S及控制系统在某炼钢厂200吨铸造系统的应用,通过实际运行检验,系统运行良好,稳定可靠,完全满足客户的生产需求。
关键词:变频器,制动电阻,制动单元,炼钢厂,铸造吊车
一、引言
铸造起重机用于冶金行业,其工作任务是为冶炼炉运送钢水。一般有5大机构:主起升,副起升、大车、主小车、副小车机构。由于起重机的位能负荷特性有更为苛刻的安全要求,各机构的大转动惯量、短时工作、频繁的起制动运行,对调速方案更加苛刻,近十年来随着直接力矩控制理论的成熟及大功率矢量变频器的成功制造,使得变频调速技术在起重机上得以成功应用。
但是,当采用变频器传动的起升机构拖动位能性负载下放或平移机构急减速、顺风运行时,异步电动机将处于再生发电状态,采用在中间直流回路设置制动电阻,让连续再生能量通过制动电阻以发热的形式消耗掉,这种方式称为能耗制动。
本文介绍了罗克韦尔自动化PowerFlex 700S变频器及控制系统在炼钢厂200吨铸造吊车上的应用,同时由于采用罗克韦尔自动化的集成架构控制系统及软件,设计和调试都变得更简单,为用户节省了时间和人力。
二、冶金起重机系统简介
本起重机为“冶金铸造起重机”,代号为“YZ200/65t-19m A7”。主钩负荷200吨,副钩负荷65吨,跨度为19m,为四梁结构,分上下小车。
主起升部分包括两台250kW电机,三台减速机;每一台电机有两个制动器,制动器形式为液压推杆式;此主起升机构的减速机为冶金铸造用棘轮棘爪减速机,两台电机输出到棘轮棘爪减速机,再通过棘轮棘爪减速机输出到两台普通减速机,通过两台普通减速机控制两台钢丝绳卷筒,每个卷筒上安装两根钢丝绳,总计四根,通过四根钢丝绳带动下面的吊具(吊钢包的板钩)。副起升为一台160kW电机驱动,利用两台液压推杆减速机进行制动。
主小车部分为两台22kW电机分别驱动两边的减速机以带动车轮旋转,通过每台电机一个液压推杆制动器进行制动。副小车运行电机为一台15kW电机带动一台减速机进行驱动两边的车轮进行工作,通过一个制动器进行制动。大车部分为四角四台45kW电机分别驱动四台减速机,带动各部分的车轮进行工作,每个电机上面一台制动器。
三、罗克韦尔自动化PowerFlex 700S变频器 PowerFlex700S是罗克韦尔自动化公司推出的高性能系统型变频器,它采用书本式结构设计,零间距安装(Zero Stacking),大大减少了变频器安装空间,从而节省大量的盘柜安装空间,节约成套成本和安装成本。内置了输入EMC滤波器,直流母线电抗器和输出共模滤波器,同时160kW以下变频器内置了制动单元,大大方便了用户的选型。因现场故障而需更换变频器时,PowerFlex700S的可插拔控制端子排可以帮助客户轻而易举地恢复控制线路。虚拟背板概念使得程序具有可移植其他Logix平台的能力,实现NetLinx?体系结构的无缝集成和直接通讯驱动。
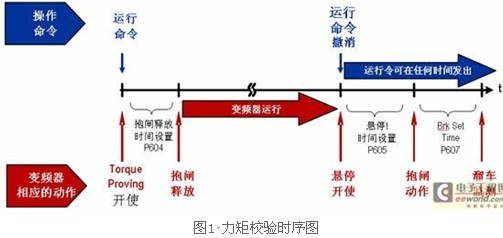
PowerFlex 700S采用是自有专利的、FORCETM磁通矢量控制技术,加上速度闭环控制,确保负载始终处于受控状态。PowerFlex 700S具有TorqProveTM力矩校验功能,TorqProveTM确保停车后机械报闸可靠的控制负载,和当收到运行命令,机械抱闸打开时变频器能控制负载;TorqProveTM and Force TechnologyTM帮助消除人们对V/F标量型、传统矢量型变频器在抱闸时控制的不定因素的担忧,并可以解决起重应用中的关键问题:
(1)溜钩保护
当负载移动停止,机械抱闸闭合,变频器将斜坡降低输出转矩,同时监测编码器反馈,确认负载被控制。如果监测到编码器反馈有变化(溜钩),变频器会马上增加输出转矩,重新控制负载,按照预先设定的速度下放负载。变频器会重复以上的周期,直到抱闸能控制负载或负载安全下放到地面。
(2)速度偏离保护(失速保护)
变频器会连续的监测速度命令和速度反馈,比较其偏差,如果偏差超出所允许的范围,那么变频器将变为故障状态,同时,抱闸投入工作。
(3)输出缺相保护
三相输出接线端被监测,确保输出每有缺相。一旦TorqProve 使能,这项功能不能被屏闭。
(4)编码器丢失
变频器会连续的监测编码器反馈,确保编码器工作正常。只要出现编码器丢失变频器马上变为故障状态,同时,抱闸投入工作。一旦TorqProve使能,这项功能必需使能.
(5)基于负载大小的速度限制
允许高于基速运行(轻载时更快运行);在基速时测量负载大小,若低于额定负载,则可超速。PowerFlex 700S变频器的力矩校验时序图如图1所示。
四、冶金起重机系统控制方案
本系统全部采用罗克韦尔自动化公司生产的PowerFlex 700S变频器,它采用ForceTM磁通矢量控制方式。这种控制方式采用实时计算的电动机转矩和转速构成转矩转速双闭环系统,其动、静态精度高(速度控制精度高达±0.001%,转矩控制精度高达±2%);在转矩响应方面,比非ForceTM控制方式变频器快许多(转矩响应响应时间≤5ms),并克服了传统调速系统和转矩开环变频器低速段输出转矩不足的问题,其零速转矩可达200%。这些特点充分保证了位能性负载的要求。
系统具体配置如下:大车行走机构采用两台变频器,分别驱动一台电动机。其中一台为主机,另一台为从机。利用主从应用软件,保证两台电动机的速度同步和负荷平衡,防止大梁扭动和啃轨。小车机构变频器采用一台变频器。主起升机构和副起升机构,分别采用一台变频器,并分别采用一台光电编码器,做速度反馈和控制检测用。系统采用能耗制动的方式将连续再生能量消耗点实现制动。所有变频器配有各类标准的现场总线接口。大车和小车的控制系统图如图2所示,主钩和副钩的控制系统图如图3所示。
未完,待续! |
